Liga en donde esta la entrada:
http://autoycontrolave.blogspot.mx/2012/11/proyecto-automatizacion-y-control.html
martes, 20 de noviembre de 2012
jueves, 15 de noviembre de 2012
Entrada # 6
Laboratorio de Automatización y Control de Sistemas Dinámicos

Viendo este problema tenemos que consiguir la señal de control óptima esta comúnmente se determina con:

Ya con esto el siguiente paso sera el analizar la ecuación J.
Teniendo:

Sustituimos el valor de U:

Teniendo lo siguiente:


Para cumplir con lo anterior hacemos el valor de Q por I, por lo tanto la factorización queda:

Sustituimos R por I, nos queda:
De la siguiente ecuación, el valor de R⁻¹ se elimina, quedando:
Teniendo la ecuación de matrices de Riccati:
Teniendo que la transpuesta de B:

Y P:

Tenemos:

Por lo tanto ya que los valores de K son 1 se sustituyen en lo que vale U, lo que nos deja por ultimo:

Referencias:
Modern Control Engineering Fourth Edition
Katsuhiko Ogata
martes, 13 de noviembre de 2012
Reporte Propiedades Estructurales
Esta actividad la hice solo ya que mi compañero me dejo solo.
Pdf del Reporte en LaTex.
https://www.dropbox.com/s/7kt9y94e86kh0p7/entrada.pdf
Código del Pdf
Código de las imágenes.
Pdf del Reporte en LaTex.
https://www.dropbox.com/s/7kt9y94e86kh0p7/entrada.pdf
Código del Pdf
Código de las imágenes.
martes, 6 de noviembre de 2012
Puntos Extra
Resumen del Artículo
Este artículo nos habla acerca de algoritmos para el control y la coordinación de los vehículos autónomos (aquellos que tienen la capacidad de manejarse por su propia cuenta).
Estos vehículos son utilizados como sensores móviles (estos se sintonizan dependiendo la búsqueda), para poder realizar detecciones mediante estos.
Cabe aclarar que los algoritmos no son los encargados de la detección (esto lo hacen los sensores); estos se encargan de definir la forma correcta con la que la cobertura sea lo mas óptima y de definir las políticas mediante la cual se realizara la detección.
Referencias:
Coverage Control for Mobile Sensing Networks
(Control de cobertura para las redes de detección móviles)
Este artículo nos habla acerca de algoritmos para el control y la coordinación de los vehículos autónomos (aquellos que tienen la capacidad de manejarse por su propia cuenta).
Estos vehículos son utilizados como sensores móviles (estos se sintonizan dependiendo la búsqueda), para poder realizar detecciones mediante estos.
Cabe aclarar que los algoritmos no son los encargados de la detección (esto lo hacen los sensores); estos se encargan de definir la forma correcta con la que la cobertura sea lo mas óptima y de definir las políticas mediante la cual se realizara la detección.
Todos los algoritmos presentados en el articulo son basados en el problema del Descenso mas Pronunciado (Gradiente), este nos dice que se encarga de buscar un mínimo que este asociado a la resolución de secuencial de varios problemas.
La estructura común de estos algoritmos es el siguiente:

Tipos de Control
Hace uso de los sistemas distribuidos para hacer uso de los sensores con los que cuenta cada automóvil.
Hace uso de los sistemas distribuidos para hacer uso de los sensores con los que cuenta cada automóvil.
jueves, 1 de noviembre de 2012
Entrada # 5
Laboratorio de Automatización y Control de Sistemas Dinámicos
Para esta semana consistió en elegir un problema y resolverlo, el elegido es el siguiente:

Considere el sistema en lazo cerrado con la siguiente función de transferencia en lazo abierto: Dibuje los diagramas polares directo e inverso de G(s)H(s) con K = 1 y K = 10.
Aplique el criterio de estabilidad de Nyquist a las gráficas y determine la estabilidad del sistema con estos valores de K.
Primeramente que son los siguientes conceptos:
Diagrama Polar
Representación de la función de transferencia senoidal, G( jω) , en coordenadas polares, para
variaciones de ω entre 0 e ∞
Son conocidos también como Diagrama de Nyquist.

Criterio de Nyquist
Medio encargado en estudiar la estabilidad en el dominio de la frecuencia.
Relaciona la respuesta en frecuencia de lazo abierto con el número de polos y ceros de la ecuación característica ubicados en el SPD.
Referente al problema hay que considerar unos puntos:
Para obtener el resultado de Nyquist, existe una función en Octave, mediante el paquete signal, que se llama nyquist().
Aquí incluyo el código en Octave:
Imagenes del resultado:
con K = 1

con K = 10
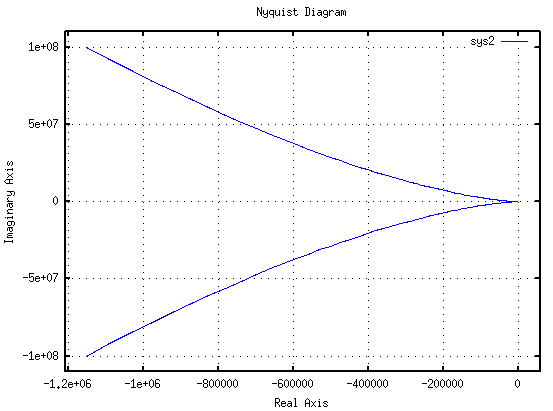
Observando las gráficas vemos que las dos están de 0 a -infinito por lo tanto las dos gráficas son estables.
Referencias:
http://www.disa.bi.ehu.es/spanish/profesores-etsi-bilbo/~jtpirgoe/Tema_7_Diagrama_Nyquist%20.pdf
Suscribirse a:
Comentarios (Atom)